کنترل PID چیست؟ — به زبان ساده و با مثال
Views:18
در این مطلب، با مفهوم کنترل PID آشنا میشویم. قبل از پرداختن به کنترل PID، مطالبی را درباره کنترل On/Off بیان میکنیم.
کنترل ON/OFF
کنترل ON/OFF سادهترین روش کنترلی در فرآیندها است، اما باعث ایجاد نوسان در متغیر فرآیند میشود (شکل ۱ (الف)). اگر بخواهیم عملکرد دستگاه سوئیچینگ کاهش یابد و از قطع و وصل مداوم رله یا همان چترینگ (chattering) اجتناب شود، باید درجهای از هیسترزیس یا باند مرده (Deadband) را در کنترل ON/OFF تنظیم کنیم (شکل ۱ (ب)).
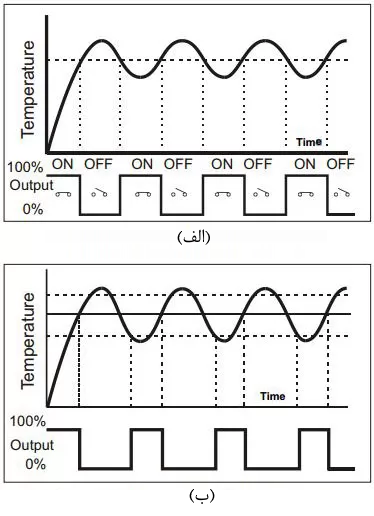
شکل ۱: (الف) کنترل ON/OFF پایه؛ (ب) کنترل ON/OFF با باند مرده
کنترل ON/OFF شکل بسیار سادهای از کنترل است که منجر به نوسان متغیر فرآیند میشود. این نوسان میتواند بر کیفیت محصول نهایی تأثیر بگذارد و در کل پدیده نامطلوبی است. روش جایگزین استفاده از کنترل ON/OFF کنترل PID است که در ادامه به آن میپردازیم.
کنترل PID
ابتدا باید این نکته را بیان کنیم که یک کنترل «حلقه بسته» شامل موارد زیر است:
- فرآیندی از پلنت که باید کنترل شود (G)
- سنسوری برای تشخیص مقدار متغیر فرآیند (PV)، مانند ترموکوپل یا دستگاه سنجش فشار
- کنترلکنندهای برای کنترل فرآیند که در اینجا کنترلکننده PID است
- خروجی (Output) به یک محرک یا دستگاه برای کنترل محرک ورودی به آن فرآیند، مانند گرما.
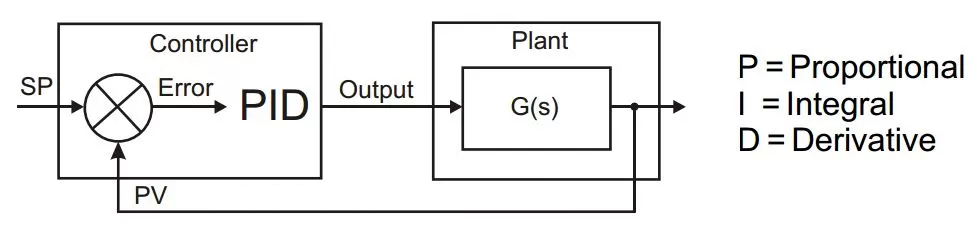
شکل ۲: نمودار بلوکی کنترل حلقهبسته PID
در ادامه، به معرفی کنترلر PID میپردازیم. برای درک عملکرد کنترلر PID، از مثال حرکت خودرو استفاده میکنیم.
ابتدا کنترل ساده ON/OF را با مثال خودرو بیان میکنیم. در اینجا پلنت خودرو است. موتور خودرو را G(s) در نظر میگیریم. با فشار دادن پدال گاز (Output) تا انتها برای رسیدن به سرعت مورد نظر (SP)، یعنی ۸۰ کیلومتر بر ساعت و نمایش آن روی سرعتسنج (PV)، در واقع عمل ON را انجام دادهایم. پس از آنکه سرعت به ۸۰ کیلومتر بر ساعت رسید، پا از روی پدال گاز برمیداریم و فرمان OFF را صادر میکنیم. به همین صورت، هنگامی که سرعت به کمتر از ۸۰ کیلومتر بر ساعت میرسد، پدال گاز دوباره تا انتها فشار میدهیم تا دوباره به ۸۰ کیلومتر در ساعت برسد و این فرآیند ادامه پیدا میکند.
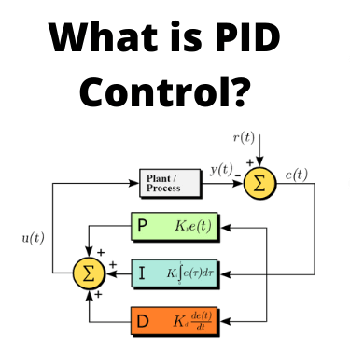
کنترل PID شامل سه جمله P (تناسبی یا Proportional)، I (انتگرالی یا Integral) و D (مشتقی یا Derivative) است. در ادامه، عملکرد این سه جمله (Term) را با مثال حرکت خودرو بیان میکنیم.
جمله تناسبی (P)
فرض کنید میخواهیم از حالت سکون به سرعت ۸۰ کیلومتر بر ساعت برسیم. بر این اساس، روشی را که برای رسیدن به این هدف اتخاذ میکنیم، شرح میدهیم تا جمله تناسبی را توضیح دهیم.
از حالت سکون پدال گاز را فشار میدهیم. سرعت خودرو افزایش مییابد و در سرعت معینی کمتر از سرعت هدف ۸۰ کیلومتر در ساعت، شروع به کاهش فشار بر پدال گاز میکنیم تا از عبور از سرعت مورد نظر جلوگیری کنیم. این کاهش فشار روی پدال گاز را میتوان مستقیماً با ورود به باند تناسبی (Proportional Band) نسبت به سرعت مورد نیاز مقایسه کرد. اگر به سرعتسنج نگاه نکنیم، مطمئناً با سرعتی رانندگی خواهیم کرد که سرعت مورد نظر ما نیست و خطا رخ میدهد.
جمله انتگرالی (I)
اگر اکنون به سرعتسنج نگاه کنیم، میبینیم که سرعتمان از سرعت مطلوب کمتر است و با استفاده از این بازخورد بصری خطا را تصحیح میکنیم و شروع به فشار آهسته پدال گاز میکنیم. در نتیجه، سرعت به آرامی افزایش مییابد تا به سرعت مورد نظر ۸۰ کیلومتر در ساعت برسیم. این روش را میتوان با زمان انتگرال (Integral Time) یک کنترلکننده PID مقایسه کرد.
جمله مشتقی (D)
اکنون با سرعت ۸۰ کیلومتر بر ساعت در حال حرکت هستیم و از طریق بازخورد بصری سرعتسنج به حفظ این سرعت ادامه میدهیم.
اگر با تغییر ناگهانی شیب جاده، مثلاً یک تپه، مواجه شویم، کاهش سرعت را تصحیح میکنیم و پدال گاز را بیشتر از مقدار کاهش جزئی سرعت که در ابتدا با آن مواجه میشویم، فشار میدهیم. هنگامی که دوباره با شیب جاده به پایین بود، پدال گاز را بیشتر از افزایش جزئی سرعت کاهش میدهیم تا از افزایش بیش از حد سرعت جلوگیری کنیم.
میزان تصحیح و زمان کاهش این تصحیح به صفر را میتوان با زمان مشتق (Derivative Time) مقایسه کرد.
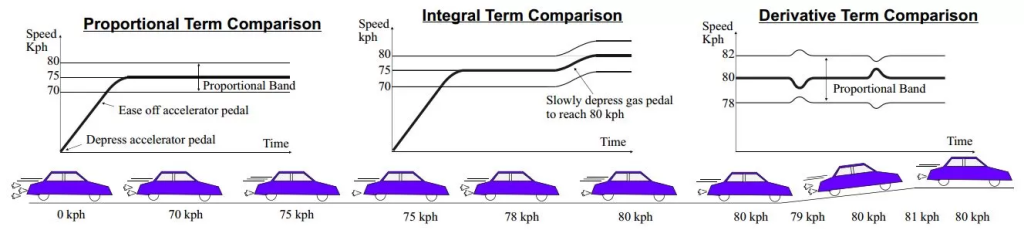
شکل ۳: مقایسه کنترل PID و حرکت خودرو
متغیرهای مختلف فرآیند مانند دما، سرعت، فشار و غیره ویژگیهای متفاوتی دارند. به عنوان مثال، دمای روی محفظه اوزونران پاسخ بسیار آهستهای دارد، در حالی که پارامتر سرعت بسیار سریعتر پاسخ میدهد و حتی فشار سریعتر از سرعت است.
آنچه در بالا بیان شد، توصیف یک کنترلکننده PID را با استفاده از عبارات ساده ریاضی شرح میدهد. در واقع، شرکتهای مرتبط با کنترل صنعتی الگوریتمهای کنترل پیچیدهای را توسعه میدهند که شامل بسیاری از ویژگیهای دیگر غیر از مواردی است که در بالا توضیح داده شد. به این ترتیب است که آنها میتوانند کنترلکنندههایی را در اختیار صنعت قرار دهند که عملکردی عالی را در طیف گستردهای از کاربردهای کنترلی ارائه میدهند.
پاسخی بگذارید